T-distribution Stochastic Neighbor Embedding(t-SNE)
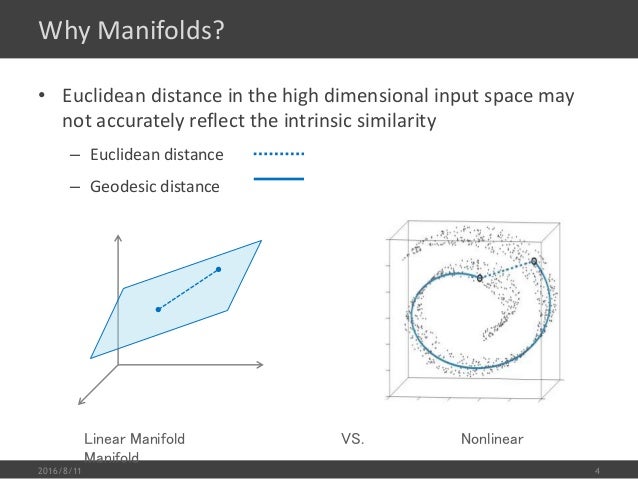
之前介绍的所有方法都存在相同的弊病:
similar data are close, but different data may collapse,亦即,相似(label)的点靠的确实很近,但不相似(label)的点也有可能靠的很近。
t-SNE 的原理
\(x \rightarrow z\)
t-SNE 一样是降维,从 x 向量降维到 z. 但 t-SNE 有一步很独特的标准化步骤:
一, t-SNE 第一步:similarity normalization
这一步假设我们已经知道 similarity 的公式,关于 similarity 的公式在【第四步】单独讨论,因为实在神妙。
这一步是对任意两个点之间的相似度进行标准化,目的是尽量让所有的相似度的度量都处在 [0,1] 之间。你可以把他看做是对相似度进行标准化,也可以看做是为求解KL散度做准备 --- 求条件概率分布。
compute similarity between all pairs of x: \(S(x^i, x^j)\)
我们这里使用 Similarity(A,B) 来近似 P(A and B), 使用 \(\sum_{A\neq B}S(A,B)\) 来近似 P(B)
\(P(A|B) = \frac{P(A\cap B)}{P(B)} = \frac{P(A\cap B)}{\sum_{all\ I\ \neq B}P(I\cap B)}\)
\(P(x^j|x^i)=\frac{S(x^i, x^j)}{\sum_{k\neq i}S(x^i, x^k)}\)
假设我们已经找到了一个 low dimension z-space。我们也就可以计算转换后样本的相似度,进一步计算 \(z^i\) \(z^j\) 的条件概率。
compute similarity between all pairs of z: \(S'(z^i, z^j)\)
\(P(z^j|z^i)=\frac{S(z^i, z^j)}{\sum_{k\neq i}S(z^i, z^k)}\)
Find a set of z making the two distributions as close as possible:
\(L = \sum_{i}KL(P(\star | x^i)||Q(\star | z^i))\)
二, t-SNE 第二部:find z
我们要找到一组转换后的“样本”, 使得转换前后的两组样本集(通过KL-divergence测量)的分布越接近越好:
衡量两个分布的相似度:使用 KL 散度(也叫 Infomation Gain)。KL 散度越小,表示两个概率分布越接近。
\(L = \sum_{i}KL(P(\star | x^i) || Q(\star | z^i))\)
find zi to minimize the L.
这个应该是很好做的,因为只要我们能找到 similarity 的计算公式,我们就能把 KL divergence 转换成关于 zi 的相关公式,然后使用梯度下降法---GD最小化这个式子即可。
三,t-SNE 的弊端
- 需要计算所有两两pair的相似度
- 新点加入,需要重新计算他与所有点之间的相似度
- 由于步骤2导致的后续所有的条件概率\(P\ and\ Q\) 都需要重新计算
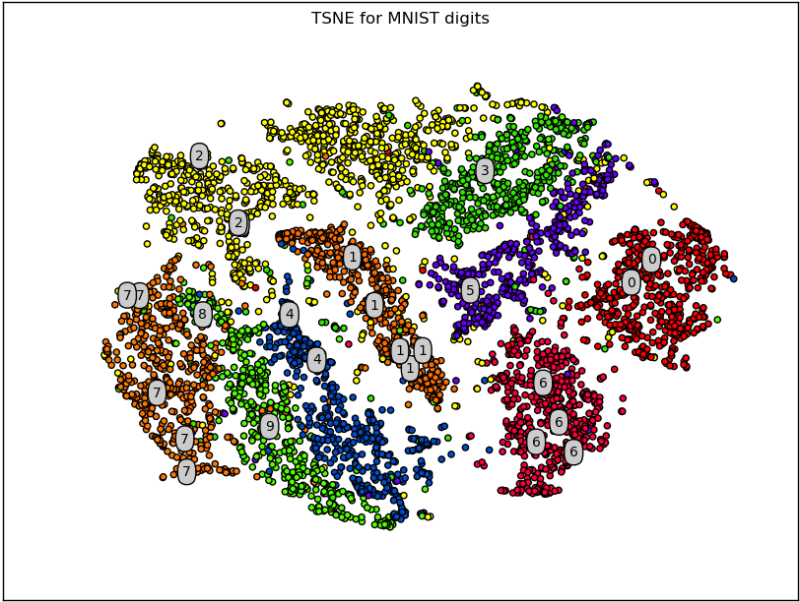
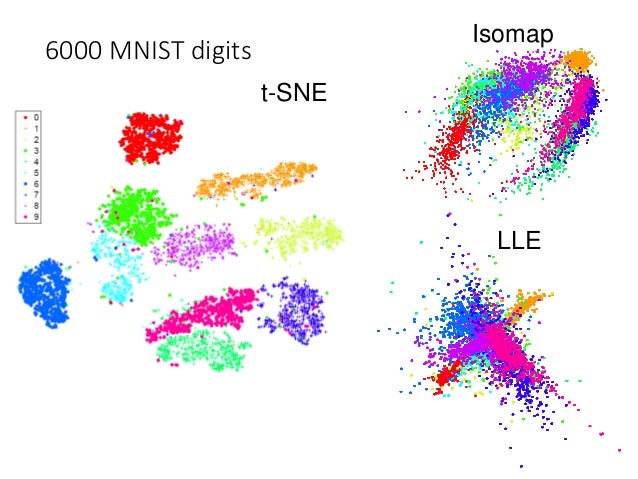
因为 t-SNE 要求我们计算数据集的两两点之间的相似度,所以这是一个非常高计算量的算法。同时新数据点的加入会影响整个算法的过程,他会重新计算一遍整个过程,这个是十分不友好的,所以 t-SNE 一般不用于训练过程,仅仅用在可视化中,即便在可视化中也不会仅仅使用 t-SNE,依旧是因为他的超高计算量。
在用 t-SNE 进行可视化的时候,一般先使用 PCA 把几千维度的数据点降维到几十维度,然后再利用 t-SNE 对几十维度的数据进行降维,比如降到2维之后,再plot到平面上。
四,t-SNE 的 similarity 公式
之前说过如果一种 similarity 公式:计算两点(xi, xj)之间的 2-norm distance(欧氏距离):
\(S(x^i, x^j)=exp(-||x^i - x^j||_2)\)
一般用在 graph 模型中计算 similarity。好处是他可以保证非常相近的点才会让这个 similarity 公式有值,因为 exponential 会使得该公式的结果随着两点距离变大呈指数级下降。
在 t-SNE 之前有一个算法叫做 SNE 在 z-space 和 x-space 都使用这个相似度公式。
similarity of x-space: \(S(x^i, x^j)=exp(-||x^i - x^j||_2)\) similarity of z-space: \(S'(z^i, z^j)=exp(-||z^i - z^j||_2)\)
t-SNE 神妙的地方就在于他在 z-space 上采用另一个公式作为 similarity 公式, 这个公式是 t-distribution 的一种(t 分布有参数可以调,可以调出很多不同的分布):
\(S(x^i, x^j)=exp(-||x^i - x^j||_2)\) \(S'(z^i, z^j)=\frac{1}{1+||z^i - z^j||_2}\)
可以通过函数图像来理解为什么需要进行这种修正,以及这种修正为什么能保证x-space原来近的点, 在 z-space 依旧近,原来 x-space 稍远的点,在 z-space 会拉的非常远:
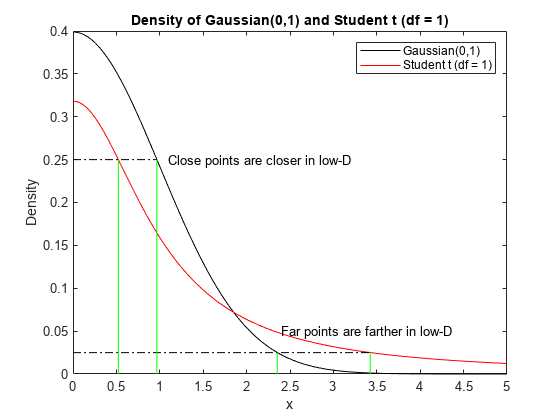
也就是说,原来 x-space 上的点如果存在一些 gap(similarity 较小),这些 gap 就会在映射到 z-space 后被强化,变的更大更大。